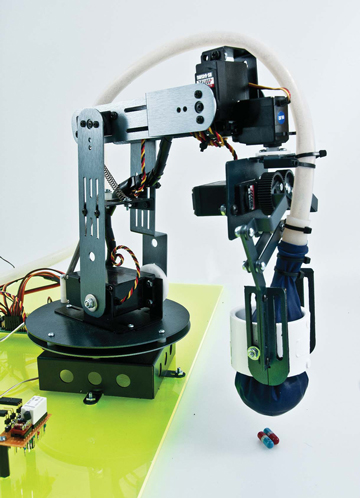
BALLOON BOT ROBOT
THE UNIVERSAL GRIPPER
Working with funds from DARPA, researchers at Cornell University, the University of Chicago and iRobot came up with a robotic gripping device using a latex party balloon filled with ground coffee. They call it a “universal gripper” and it takes advantage of a physical phenomenon called jamming transition.
When particles like coffee grounds are densely packed they can no longer slide past each other and behave like a solid. When the grounds are loosely packed, they behave like a liquid. You have probably seen this effect if you have ever bought one of those vacuum- packed bags of ground coffee. Because all the air has been removed, the coffee is tightly packed and forms a hard brick. When you open the bag and let the air back in, they return back into loose coffee grounds..
Using this principle the Universal Gripper will conform to just about any shape when pressed against an object. A pump then removes the air creating a vacuum that in turn causes the coffee grounds to “lock up” and grip the object. The object can now be manipulated or moved to a new location. To release the object the vacuum is removed and air is allowed to flow back into the balloon.
Using this elegant idea I constructed my own version mostly from parts that I had lying around my lab. So let’s take a look at the components as well as the techniques I used to build my very own gripper which I appropriately called BalloonBot.

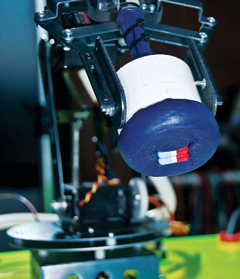
Close-up of the PVC coupling used to hold the coffee filled balloon. Note the short piece of PVC pipe at the bottom which forms a ridge that the balloon will grip when suction is applied
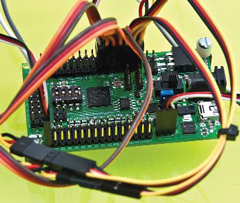
The Yost ServoCenter Mini controller board is used to control the 6 servos on the SG6-UT robotic arm as well as the power relay for the Handi-Vac suction pump. It connects to the PC using a standard USB mini cable.
THE CRUSTCRAWLER SG6-UT ROBOTIC ARM
For the arm I used the CrustCrawler SG6-UT Arm. It is an all aluminum 5-axis robotic arm system constructed from anodized 0.063-gauge 5052 brushed finished aluminum components. The arm uses the CrustCrawler Retract System (CRS). The CRS system is a custom manufactured spring and tension plate that is used to cancel the forward weight of the robotic arm from the elbow to the gripper allowing the servo to use its entire torque curve for lifting objects. The CRS system also increases lifting capacity and servo life. Although this project will not take full advantage of the SG6’s own gripper assembly it does contain an adjustable electronics stand located above the gripper assembly to accommodate an array of sensors and the ends of the gripper are rounded for an even gripping surface.
THE YOST ENGINEERING SERVOCENTER MINI
Picking up two gell caps is a piece of cake!
To control the SG6-UT arm’s six servos and the vacuum pump (more on the pump later) I used the powerful Yost Engineering ServoCenter Mini embedded servo controller. This controller allows RC servo motors to be controlled from any USB port. The ServoCenter can control the seek position and speed of up to sixteen connected servos — independently and simultaneously, with simple serial commands. You can also chain ServoCenters together to control up to 256 RC servos, with completely independent movement, from only one USB port. Independent control allows you to move one servo to a position slowly, while another is moving to a different position at a faster speed, and group moves allow you to synchronize multiple servos easily. The ServoCenter controller provides a built-in Sequencer / BASIC Interpreter called SC-BASIC which allows the sequencer to run independently on the board itself. Sequencer programs are stored in non-volatile EEPROM memory that retains the program even when the unit is reset or powered off, eliminating the need for a PC or other external command device.







