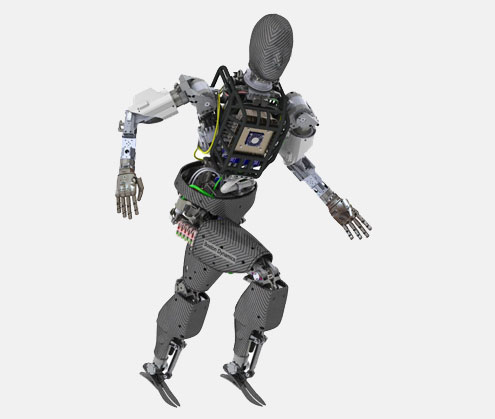
Virginia Tech-THOR
Virginia Tech proposed to develop THOR, a Tactical Hazardous Operations Robot, which will be state-of-the-art, light, agile and resilient with perception, planning and human interface technology that infers a human operator’s intent, allowing seamless, intuitive control across the autonomy spectrum.
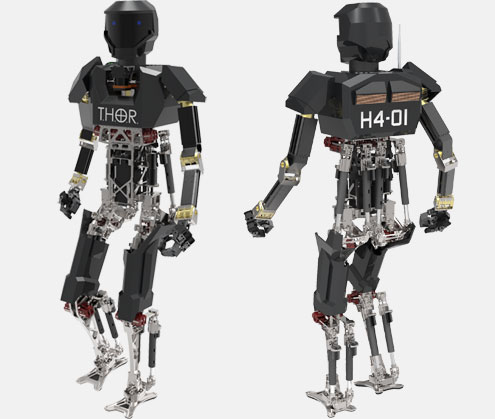
The team will emphasize three essential themes in developing THOR: hardware resilience, robust autonomy and intuitive operation.
SCHAFT Inc.- HRP-2 ROBOT
SCHAFT Inc. proposed a bipedal robot based on mature hardware and software designed for its existing HRP-2 robot.
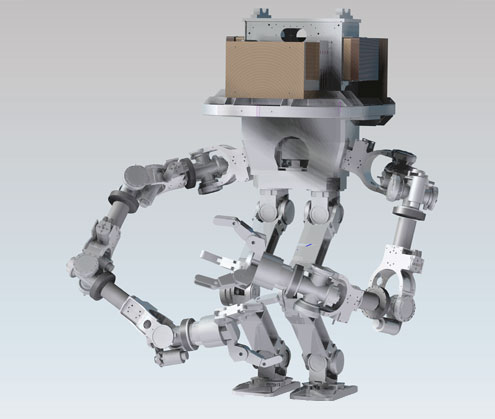
SCHAFT Inc. proposed a bipedal robot based on mature hardware and software designed for its existing HRP-2 robot. SCHAFT will create an Intelligent Robot Kernel in which it will combine the necessary software modules for recognition, planning, motion generation, motion control and a user interface. The group will divide into three teams to execute the tasks: hardware design, software integration and scenario testing
RAYTHEON
Raytheon proposed to construct Guardian, a new, self-powered, lightweight, robust, dexterous humanoid robot that will build on the team’s experience with human-scale exoskeletons.
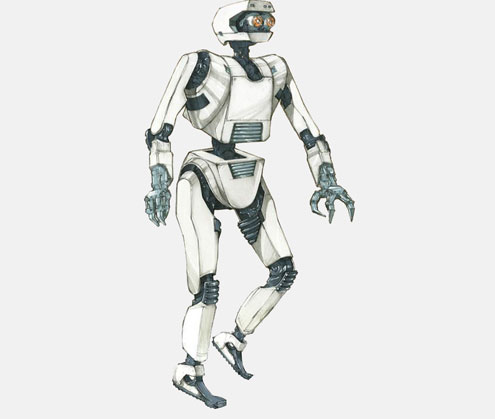
The Guardian robot will expand its Exoskeleton (XOS) concept, introducing innovative technologies such as large range of motion, high specific torque/power actuators and a rapidly modulated fluid supply for overall power efficiency.
This articles published by DARPA Robotics Challenge Track A - Teams and Designs,Carnegie Mellon University (CMU) – National Robotics Engineering Center (NREC)







